
次のページ
前のページ
目次
TEC-0-1-17
TEC-0-1-50
【補足説明欄】
1行目の[角速度]は、CAN-1-1-26-2からCAN-1-1-27-2までの記事のタイトルです。2020.12.24
2行目について。
ri(t)は、x1-x2-x3系(CAN-1-1-22-16)で測った第i質点Pi(CAN-1-1-15-3)の座標であり、列ベクトルです。
r'iは、x'1-x'2-x'3系(CAN-1-1-22-15)で測った第i質点Pi(CAN-1-1-15-3)の座標であり、列ベクトルです。
これらをCAN-1-1-22-17の式に代入して両辺をtで微分すれば、CAN-1-1-26-2の等号の成立が分かります。
CAN-1-1-15のri(t)は矢印ベクトルと解釈されても列ベクトルと解釈されても、どちらでも構いません。
r'iが時刻tに依存しないのは、x'1-x'2-x'3系が剛体に固定された座標系だからです。2008.7.29, 2008.7.30, 2008.8.1;2020.12.25,26,27
3行目について。
ω(t)も列ベクトルです。
列ベクトル同士の外積は TEC-0-1-15-24〜26 で定義されています。
3行目の等号の成立根拠は
[(d/dt)B(t)]r'i = ω(t)×[B(t)r'i] ・・・※
である事です。
※の成立根拠は、TEC-0-1-17-20〜22の式とTEC-0-1-19-10〜12の式です。
※を図解すると次の様に成ります。
B(t)はベクトルを回転する行列だからB(t)r'iの長さは時間が経っても変わらない事と、時間が経っても長さが変わらないベクトルには必ず角速度(CAN-1-1-3-26)が存在する事から、
(d/dt)[B(t)r'i] = ω(t)×[B(t)r'i]
である様なω(t)が存在する、と分かる。
時間が経っても長さが変わらないベクトルには必ず角速度が存在する事は、
(d/dt)|r| = 0 ⇒ 2r・(dr/dt) = (d/dt)(r・r) = (d/dt)|r|2 = 2|r|(d/dt)|r| = 0 ∴ r・(dr/dt) = 0
である事とTEC-0-1-7-1〜5の内容から分かります。2008.7.29, 2008.7.30, 2008.8.1;2020.12.25,26,27,29
5行目の式の成立根拠は、TEC-0-1-17-23〜25の式です。
5行目の式の代わりに使える式がTEC-0-1-50-2に書かれています。2020.12.26;2021.02.12
6,7行目について。
x1-x2-x3系の座標軸方向の単位ベクトルをi, j, kとし、x'1-x'2-x'3系の座標軸方向の単位ベクトルをi', j', k'とすると、
ω1(t)i + ω2(t)j + ω3(t)k = ω'1(t)i' + ω'2(t)j' + ω'3(t)k'
である事が、この式より導かれます。(CAN-1-1-9-4〜6への補足説明を参照せよ)
つまり、ω'(t)はx'1-x'2-x'3系で測った角速度ベクトルの成分表示です。
x'1-x'2-x'3系に対して剛体は静止しているのに何故ω'(t)がゼロベクトルでないかと言うと、それは、ω'(t)が表すのが、x'1-x'2-x'3系に対する剛体の運動の角速度ベクトルではなく、x1-x2-x3系に対する剛体の運動の角速度ベクトルのx'1-x'2-x'3系で測った成分表示だからです。2008.7.29, 2008.7.30, 2008.8.1;2020.12.25,26,27
9行目の(1)は、9〜18行目の記事の番号です。2020.12.24
10〜18 行目と、20〜25 行目と、27〜30 行目は、本当はインデントしなくてはいけない。
10行目の左の等号の成立根拠は、5行目の最も左の式です。2020.12.27
10行目の右の等号の成立根拠は、
dB/dt = (dB-1/dt)t
である事と
Bt = B-1 ∵CAN-1-1-22-19,26,27
である事です。
前者については、Bt = B-1 である事と (dBt/dt)t = dB/dt である事から
dB/dt = (dB-1/dt)t
だと分かります。
(dBt/dt)t = dB/dt である事は、dBt/dt = (dB/dt)t の両辺を転置する事によって分かります。
dBt/dt = (dB/dt)t である事は、行列の成分表示で考えれば分かります。
(dBt/dt)jk = d(Bt)jk/dt = dBkj/dt = (dB/dt)kj = [(dB/dt)t]jk
これは、行列を転置した後で微分しても微分した後で転置しても結果は同じである事、を意味します。2020.12.27,28,29;2021.06.04
11,13,15行目の等号の成立根拠は、CAN-1-1-23-16〜26の内容です。
これらの等号の成立の確認は単純計算ですが、計算量が多いので音を上げる人が出るかもしれません。
私は、(sinψ)(cosθ)(sinφ)をscsと略記する、(cosψ)(cosφ)をc1cと略記する、cosθを1c1と略記する、(sinψ)(cosψ)(sinθ)(cosφ)2をsc・s・c2と略記するなどして、筆記の煩雑さを縮減しました。
そういう工夫なしでは私でも敬遠するぐらいの計算量です。
この略記法を覚えても、適用できる問題に出くわす事は希でしょう。
それよりも、問題ごとに数式の特徴を見抜いてそれに合った略記法を自分で作る態度、を身に付けて下さい。
[(dB-1/dt)tB-1]jk = [(dB-1/dt)t]j1(B-1)1k + [(dB-1/dt)t]j2(B-1)2k + [(dB-1/dt)t]j3(B-1)3k
= (dB-1/dt)1j(B-1)1k + (dB-1/dt)2j(B-1)2k + (dB-1/dt)3j(B-1)3k
である事を使えば、(dB-1/dt)tの成分表示を書かずに済みます。
途中で随時 s2 + c2 = 1 である事を使います。
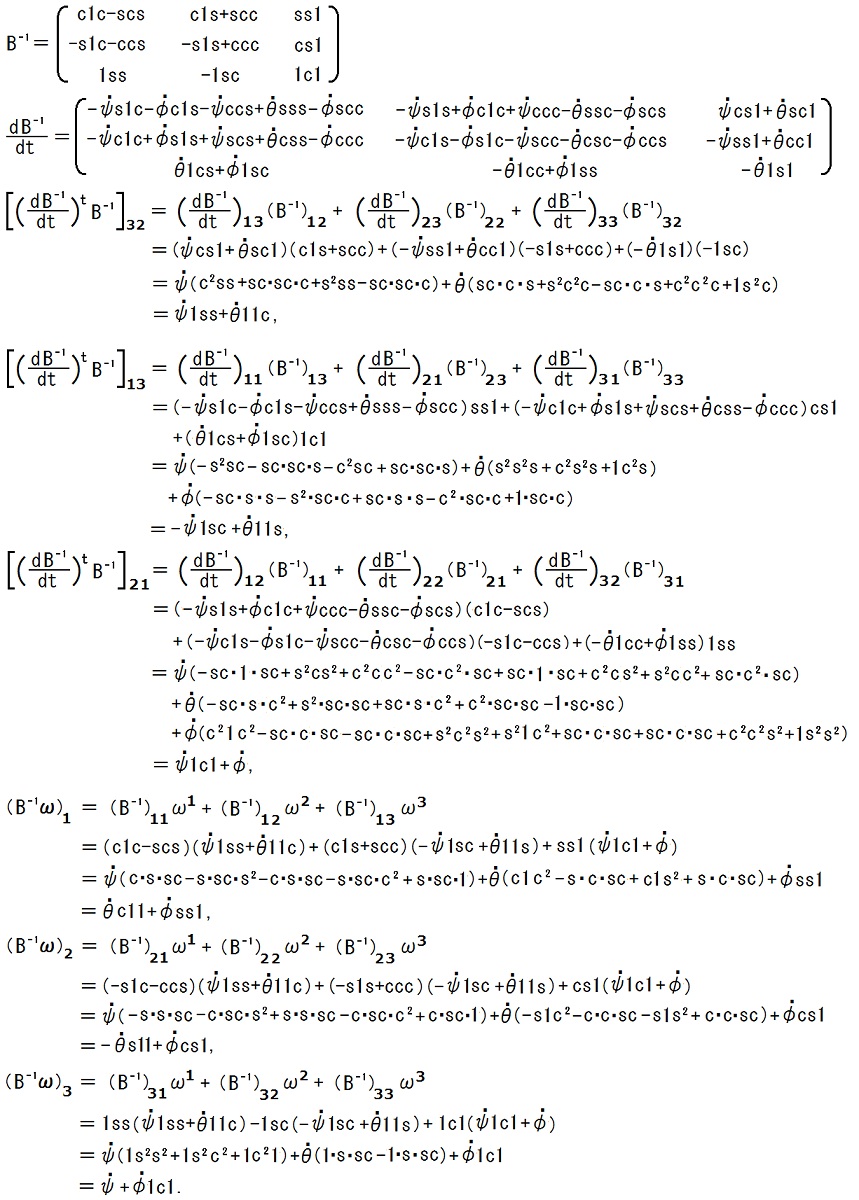
計算はこんなに長たらしいのに、結果は11,13,15行目に書かれている様に簡単です。
この様に途中計算は複雑なのに結果が簡単に成る問題には必ず途中計算まで簡単な別の解法が存在するはずだ、と言う人が居ます。
私も、そう思います。
こういう考え方は大切ですよ。
これなんかも、根拠が無ければ主張してはいけない、という最近ますます強まって来ている風潮が間違っている事を示す好例です。
試しにチョッとやってみましょう。
CAN-1-1-23-5〜14の図から角速度ベクトルは、
dθ/dt = dφ/dt = 0 ならば (dψ/dt)k',
dψ/dt = dφ/dt = 0 ならば (dθ/dt)k×k'/|k×k'|,
dψ/dt = dθ/dt = 0 ならば (dφ/dt)k
だと分かります。
従がって、一般の場合には
(dψ/dt)k' + (dθ/dt)k×k'/|k×k'| + (dφ/dt)k
だろうと推測できます。
このベクトルとi, j, kとの内積を取ればω1, ω2, ω3を求める事が出来るし、i', j', k'との内積を取ればω'1, ω'2, ω'3を求める事が出来そうです。
ω1 = [(dψ/dt)k' + (dθ/dt)k×k'/|k×k'| + (dφ/dt)k]・i
= (dψ/dt)(k'・i) + (dθ/dt)[(k×k')/|k×k'|]・i + (dφ/dt)(k・i)
= (dψ/dt)(B-1)31 + (dθ/dt)cosφ ∵ k'・i = B13 = (Bt)31 = (B-1)31 ∵ CAN-1-1-8-14
= (dψ/dt)(sinθ)(sinφ) + (dθ/dt)cosφ,
ω2 = [(dψ/dt)k' + (dθ/dt)k×k'/|k×k'| + (dφ/dt)k]・j
= (dψ/dt)(k'・j) + (dθ/dt)[(k×k')/|k×k'|]・j + (dφ/dt)(k・j)
= (dψ/dt)(B-1)32 + (dθ/dt)cos(π/2 - φ) ∵ k'・j = B23 = (Bt)32 = (B-1)32 ∵ CAN-1-1-8-14
= -(dψ/dt)(sinθ)(cosφ) + (dθ/dt)sinφ,
ω3 = [(dψ/dt)k' + (dθ/dt)k×k'/|k×k'| + (dφ/dt)k]・k
= (dψ/dt)(k'・k) + (dθ/dt)[(k×k')/|k×k'|]・k + (dφ/dt)(k・k)
= (dψ/dt)(B-1)33 + dφ/dt ∵ k'・k = B33 = (Bt)33 = (B-1)33 ∵ CAN-1-1-8-14
= (dψ/dt)cosθ + dφ/dt.
やっぱりだ、出来ました。
この解法を完成させる為には、さらに論理の飛躍を無くす必要が有ります。2020.12.27,28,29;2021.01.01,02,03,04,10;2021.06.05
12行目の左の等号の成立根拠は、5行目の中央の式です。2020.12.27
12行目の右の等号の成立根拠は、10行目の右の等号の成立根拠と同じです。2020.12.27
14行目の左の等号の成立根拠は、5行目の最も右の式です。2020.12.27
14行目の右の等号の成立根拠は、10行目の右の等号の成立根拠と同じです。2020.12.27
16,17,18行目の左の等号の成立根拠は7行目の式です。2020.12.27
16,17,18行目の右の等号の成立根拠は、10〜15行目の計算の結果と、CAN-1-1-23-16〜26の内容です。2020.12.27
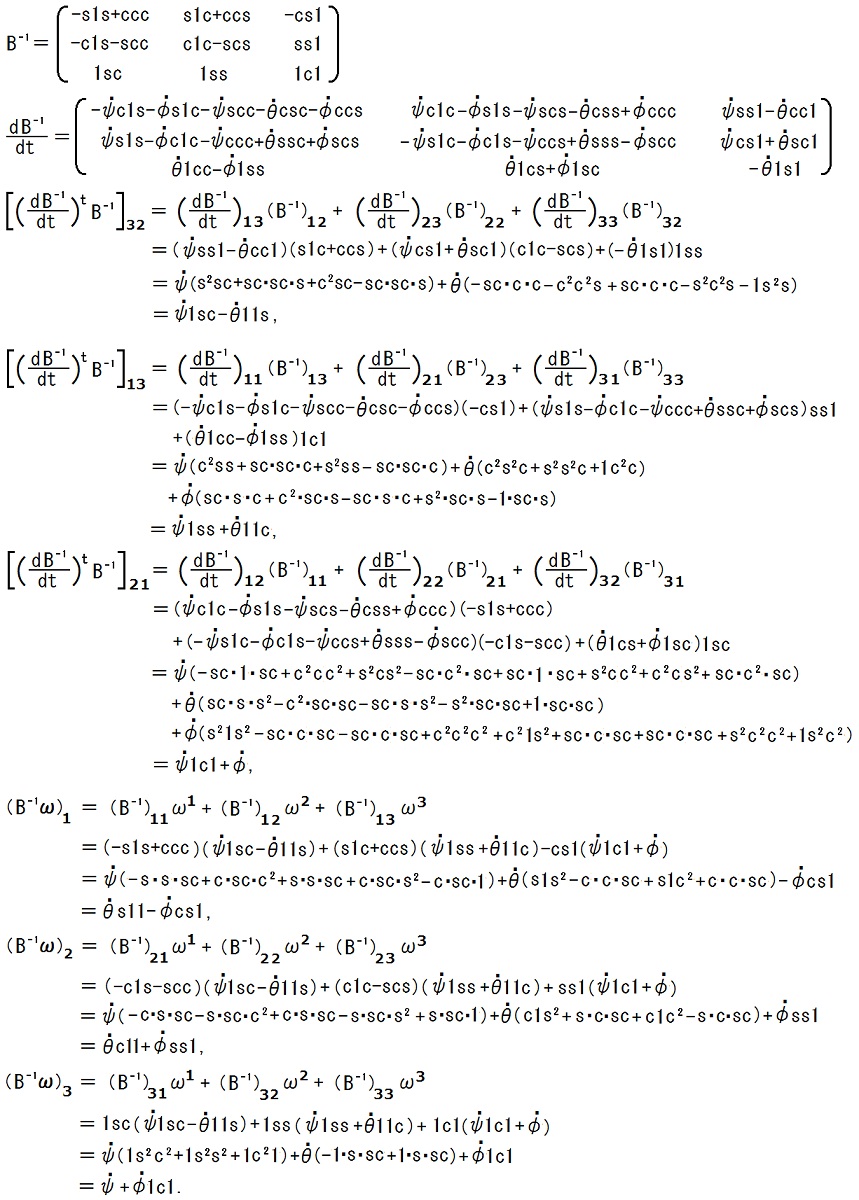
19行目の(2)は、19〜25行目の記事の番号です。2020.12.24
20〜25行目でも、計算方法は10〜18行目と同じです。
ただし20〜25行目では、CAN-1-1-23-16〜26の内容ではなく、CAN-1-1-24-17〜27の内容を使います。2020.12.27,28;2021.01.06
27行目からCAN-1-1-27-2まででも、計算方法はCAN-1-1-26-10〜18と同じです。
ただしCAN-1-1-26-27からCAN-1-1-27-2まででは、CAN-1-1-23-16〜26の内容ではなく、CAN-1-1-25-6〜16の内容を使います。2020.12.27,28;2021.01.06
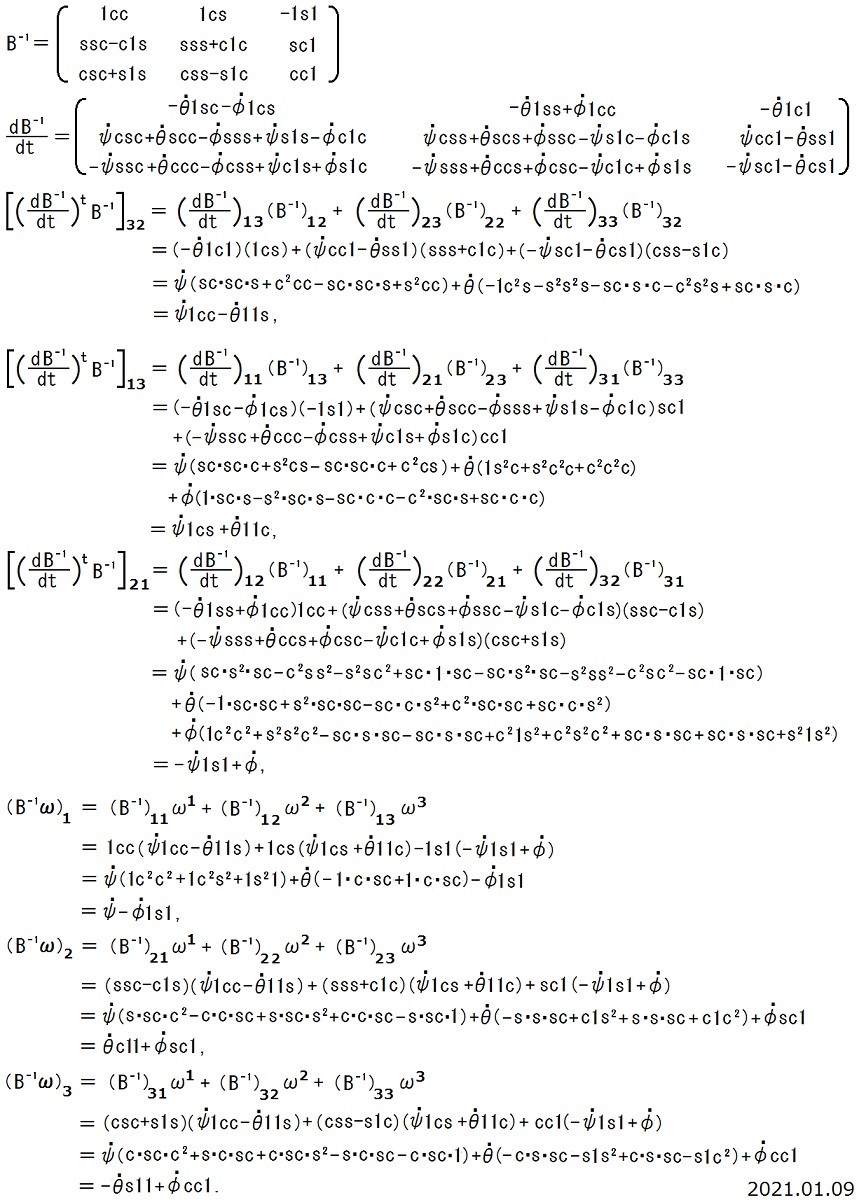
26行目の(3)は、CAN-1-1-26-26からCAN-1-1-27-2の記事の番号です。2020.12.24
10,12,14,20〜22,27〜29行目についての助言が、TEC-0-1-50-2〜4に書かれています。2020.12.27
【SEOテキスト】宇田雄一,04.2.9,第3章,質点系の力学,[角速度],i(t)=,(t)+,(t)r'i=,(t)+ω(t)×[B(t)r'i],ただし、,ω1=(,Bt)32,ω2=(,Bt)13,ω3=(,Bt)21,ついでにω'1,ω'2,ω'3を次式で定義しておく。,ω'(t)=[B(t)]-1ω(t),ωとω'をオイラー角で表すと、以下のごとくである。,(1)x-規約では、,ω1=(,Bt)32=[(dB-1/dt)tB-1]32=,cosφ+,sinφsinθ,ω2=(,Bt)13=[(dB-1/dt)tB-1]13=,sinφ-,cosφsinθ,ω3=(,Bt)21=[(dB-1/dt)tB-1]21=,+,cosθ,ω'1=(B-1ω)1=,sinθsinψ+,cosψ,ω'2=(B-1ω)2=,sinθcosψ-,sinψ,ω'3=(B-1ω)3=,cosθ+,(2)y-規約では、,ω1=-,sinφ+,cosφsinθ,ω2=,cosφ+,sinφsinθ,ω3=,+,cosθ,ω'1=-,sinθcosψ+,sinψ,ω'2=,sinθsinψ+,cosψ,ω'3=,cosθ+,(3)xyz-規約では、,ω1=-,sinφ+,cosφcosθ,ω2=,cosφ+,sinφcosθ,ω3=,-,sinθ,ω'1=-,sinθ+