
次のページ
前のページ
目次
TEC-0-1-3
TEC-0-1-4
TEC-0-1-5
COM-1-1
COM-1-2
【補足説明欄】
このページの第1行目から第7行目までは、前ページの第23行目から第30行目までの続きです。2010.08.30
第1行目の記号×は外積を表します。2010.09.19
第2行目から第5行目までの式の導出方法は、TEC-0-1-3-11~20に書かれています。2013.02.12,13
第2行目から第7行目までの内容についての補足説明が、COM-1-1-22~30に、書かれています。2013.02.20
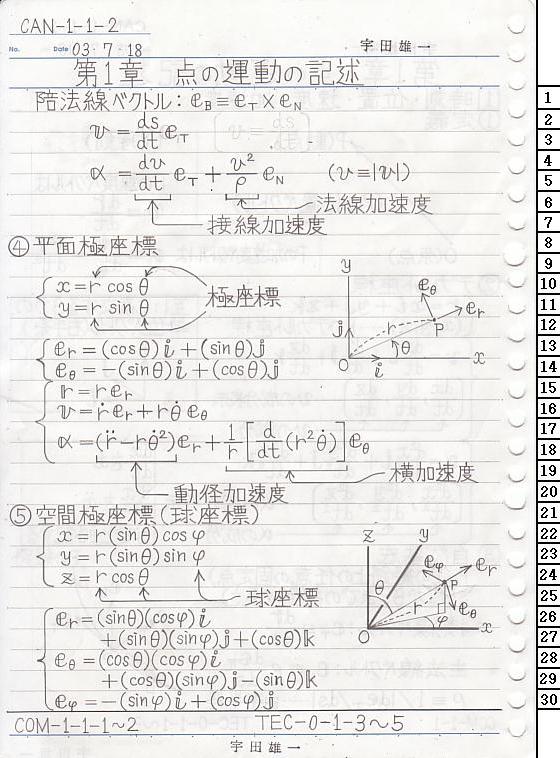
eTが単位ベクトルである事を考慮すると、第2, 3行目の式から|v|=ds/dtである事が読み取れます。
何故そう言えるかは、TEC-0-1-3-15, 16にも書かれていますが、(ds/dt)eTはeTと同じ向きを持ち長さがeTのds/dt倍である様なベクトルだから(ds/dt)eTの長さはds/dtだ、という風に理由付ける事も出来ます。
第4, 5行目に書かれているv≡|v|という記号法を使うと、第2, 3行目の式からv=ds/dtである事が読み取れる、と言えます。
第2, 3行目の式の証明は、TEC-0-1-3-12, 13に書かれています。2010.08.30,2011.10.29
第4行目から第7行目までで、v2/ρ>0だから法線加速度は(v2/ρ)eNというベクトルの大きさですが、dv/dtは負にも成り得るので接線加速度はいつでも(dv/dt)eTというベクトルの大きさであるとは限りません。
dv/dt>0の時には(dv/dt)eTは大きさがdv/dtでeTと同じ向きを持つベクトルですが、dv/dt<0の時には(dv/dt)eTは大きさが|dv/dt|=-dv/dtでeTと逆の向きを持つベクトルです。2010.08.31,2010.09.01
第8行目から第12行目までについて、デカルト座標が(x, y, 0)である様な点(位置)の平面極座標は、第10, 11行目の式で定義されるrとθを用いて書かれた行ベクトル(r, θ)です。
その様な(r, θ)は同一の(x, y, 0)に対して複数存在します。
デカルト座標と極座標の対応を一対一にしたければ、例えば 0≦θ<2π and (r=0⇒θ=0) という条件を付けるだけで良いが、その様な事はしないのが普通です。
その様な事をすると、rとθを時刻tの関数として書いた時に、θがtの連続関数に成らず不便だからです。
第9行目から第12行目までにはrとθの各々が極座標であるかの様に書かれていますが、そう書かれている文献と、rとθの各々ではなく行ベクトル(r, θ)を極座標だとする文献の、両方があります。2010.08.31,2010.09.06,2011.10.30
i, jとx軸, y軸を第9行目から第14行目までの図の様に関係付ければ、高校で用いたx軸とy軸でデカルト座標を定義する事も出来ます。
第10, 11行目の式は、図では、x軸上の点x=rを原点Oの周りに反時計回りに角θだけ回転するとPに重なる、という風に理解されます。
erはrと同じ向きを持つ単位ベクトルです。
eθは、erに直行する単位ベクトルの中で、θの増加の向きのものです。2010.09.03,04,05
第10,11行目の内容に対するコメントが、COM-1-2-2に書かれています。2013.02.23
第13,14行目の式の導出方法は、TEC-0-1-3-23~TEC-0-1-4-1に書かれています。2013.02.12
第16,17,18行目の式の導出方法は、TEC-0-1-4-4~24に書かれています。2013.02.13
第17行目から第20行目まででは、動径加速度も横加速度も負に成り得るので、第4行目から第7行目までについての補足説明の中の接線加速度についての補足説明と同様の事情に注意してください。2010.08.31,2010.09.01
第21行目から第25行目までについて、デカルト座標が(x, y, z)である様な点(位置)の空間極座標は、第22行目から第24行目までの式で定義されるr, θ, φを用いて書かれた行ベクトル(r, θ, φ)です。
その様な(r, θ, φ)は同一の(x, y, z)に対して複数存在します。
しかし、平面極座標の時と同様の理由で、空間極座標でも、デカルト座標との対応を一対一にするための 0≦φ<2π and (r=0⇒θ=φ=0) といった条件は付けないのが普通です。
ただし、空間極座標では0≦θ≦πです。
第22行目から第25行目までにはr, θ, φの各々が球座標であるかの様に書かれていますが、そう書かれている文献と、r, θ, φの各々ではなく行ベクトル(r, θ, φ)を球座標だとする文献の、両方があります。2010.09.01,06,2011.10.30
第22行目から第27行目までの図の見方が分からない人は、仮想的に、rを地球の半径、Pを東京、erを真上、eθを真南、eφを真東、と考えてみてください。
erはrと同じ向きを持つ単位ベクトルです。
eθは、erに直行する単位ベクトルの中で、θの増加の向きのものです。
eφは、erに直行する単位ベクトルの中で、φの増加の向きのものです。
また、Pからx-y平面に下ろされた垂線の足をHとすると、直線OHとx軸の間の角がφです。2010.09.01,05
線分OHの長さがr(sinθ)である事に着目すると、第22, 23行目の式の意味が分かります。
右ネジをz軸の正の向きに進めるために回すのと同じ向きに角φだけ、z-x平面をz軸の周りに回転させると、Pとz軸で決まる平面に重なります。
iの向きはx軸の正の向きに一致し、jの向きはy軸の正の向きに一致し、kの向きはz軸の正の向きに一致します。2010.09.03,04
第26行目から第30行目までの式の導出方法は、TEC-0-1-4-27~TEC-0-1-5-12に書かれています。2013.02.13
脚注の「COM-1-1-1~2」は誤りです。正しくは「COM-1-1,2」です。
【SEOテキスト】03.7.18,宇田雄一,第1章,点の運動の記述,陪法線ベクトル:eB≡eT×eN,ds,v=,-,eT,dt,dv,v2,α=,-,eT+,-,eN,(v≡|v|),dt,ρ,法線加速度,接線加速度,④平面極座標,y,x=r cosθ,eθ,極座標,y=r sinθ,er,j,r,P,er=(cosθ)i+(sinθ)j,θ,eθ=-(sinθ)i+(cosθ)j,O,i,r=rer,v=,er+,r,eθ,α=,(,-r,2,)er+,1,-,r,[,d,-,(r2,),dt,]eθ,横加速度,動径加速度,⑤空間極座標(球座標),x=r(sinθ)cosφ,z,y,y=r(sinθ)sinφ,eφ,er,z=r cosθ,θ,P,球座標,r,eθ,er=(sinθ)(cosφ)i+(sinθ)(sinφ)j+(cosθ)k,φ,x,O,eθ=(cosθ)(cosφ)i+(cosθ)(sinφ)j-(sinθ)k,eφ=-(sinφ)i+(cosφ)j