
次のページ
目次
TEC-0-1-1
TEC-0-1-2
TEC-0-1-3
COM-1-1
【補足説明欄】
第1行目の [1]時刻・位置・速度・加速度 は、このページの第2行目からCAN-1-1-3-14までの記事、のタイトルです。2011.10.14,18
第3行目から第9行目までの内容についての補足説明が、COM-1-1-2~4に、書かれています。2013.02.20
第2行目から第9行目までには、
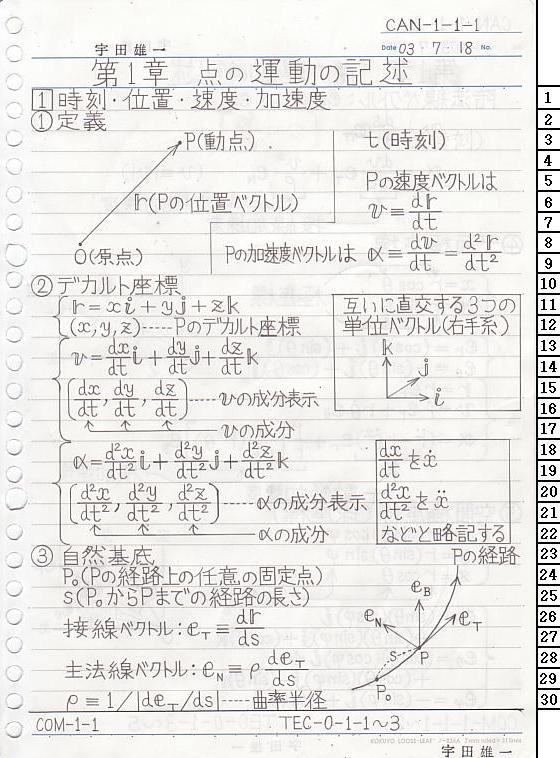
原点Oを始点とし動点Pを終点とする矢印を「Pの位置ベクトル」と呼ぶ事、および、Pの位置ベクトルをrで表し時刻をtで表すとき第6, 7行目の式で定義されるvを「Pの速度ベクトル」と呼び第8, 9行目の式で定義されるαを「Pの加速度ベクトル」と呼ぶ事が、
書かれています。
これは動点Pが質点の位置であってもなくても言える事です。
「動点」という言葉を使いましたがPは、常に動き続けていなくてはいけないわけではなく、ずっと静止したままでも構わないし、一時的に静止するだけでも構いません。
原点Oは任意ですが、速度ベクトルや加速度ベクトルの定義に使う原点は、ずっと静止したままでなくてはいけません。2010.08.17
第6行目から第9行目までのr, v, αの様に、物理学では3次元ベクトルを表す文字は太字にするのが慣例です。
手書きの場合には、これらの文字の縦線部分を二重にします。2010.08.17
第6行目から第9行目までの等号≡は「左辺を右辺で定義する」という意味です。
第8, 9行目の右の等号が≡ではなく=であるのは、dv/dt=d2r/dt2が定義の式ではなく第6, 7行目の式から導出される式だからです。2010.08.17
第11, 12行目には、Pの位置ベクトルrを3つの実数x, y, zを使ってr=xi+yj+zkの形に書いたときに行ベクトル(x, y, z)をPのデカルト座標と呼ぶ事が、書かれています。2010.08.21
第13,14行目の式と第18,19行目の左の式についての補足説明が、TEC-0-1-1-2~15に書かれています。2013.02.11
第11行目から第16行目までの枠で囲ってある部分には、デカルト座標の定義に使う3つのベクトルi, j, kが、いずれも単位ベクトルで互いに直行していなければいけない事、右手系を成していなければいけない事、および、例えばiが右向きでkが上向きでjが手前から奥へと向かう向きである場合にi, j, kが右手系を成す事が、書かれています。
このi, j, kの向きの関係は、iをjに重ねる90度の回転を考えた時、その向きに右ネジを回せばネジがkの向きに進む、という関係です。
3つのベクトルの向きの相対的な関係がこの様に成ってさえいれば、i, j, kの各々の向きがどうであっても、i, j, kは右手系を成す、と言われます。2010.08.22,24
i, j, kが右手系でなければいけない、というのは、そうしなければ(x, y, z)はデカルト座標には成らない、という意味ではなくて、単に、物理学者が慣習的にi, j, kという記号で表すベクトルの組は右手系を成すので、その慣習に従わないと話が通じ難く成る、といった程度の意味です。
i, j, kが互いに直行する3つの単位ベクトルでありさえすれば、それらが右手系を成さなくても、つまり左手系を成す場合でも、第11行目の式で定義されるx, y, zに対して、行ベクトル(x, y, z)はデカルト座標と呼ばれます。
また、きちんと断ってから用いるのであれば、同じi, j, kという記号で、左手系を成すベクトルの組を表しても、その他のどんなベクトルの組を表しても構いません。2010.08.24
12行目の「右手系」という言葉は、 i が第 1 ベクトル、 j が第 2 ベクトル、 k が第 3 ベクトル、という順序付けを前提にしている。
ベクトルの外積について、 i × j = k ,j × k = i ,k × i = j が成り立つ。
1 → 2 → 3 ,2 → 3 → 1 ,3 → 1 → 2 といった順序は「サイクリック・オーダー」と呼ばれる。
「サイクリック」とは「循環的」という意味で、「オーダー」とは「順序」という意味だ。
上記の 3 つのサイクリック・オーダーは、いずれも、 1 → 2 → 3 → 1 → 2 ・・・ という循環の部分になっている。
この事は、正三角形の頂点に 1 ,2 ,3 という番号を付けると、良く分かる。
ベクトル j は、紙面に垂直で、紙面の表から裏へ向かう向きを持つ。
単位ベクトルの長さは、1cmでも1メートルでもなく、1です。
つまり、例えばrがiの向きを持つ長さ3cmのベクトルである場合、x=3, |i|=1cmではなく、x=3cm, |i|=1です。
すると、厳密には、単位ベクトルの図をrと同じ空間内に描く事は出来ない事に成りますね。
本当にそうなのか、ちょっと私には自信が無いので、自分(達)でも考えてみてください。
物理学の慣例ではx=3とはせずx=3cmとするので、多分そうです。
宇田の文法主義では、x=3, |i|=1cmとするタイプの概念構成を用いる(単位ベクトルを用いない)ので、この様な釈然としない感じは生じませんが、当物理学正典では物理学の慣例に従い文法主義は採用しません。
単位ベクトルという概念の釈然としない感じが嫌なら、方向ベクトルという概念を採用するのが良いでしょう。
方向ベクトルという名称もまだ「ベクトル」という語を含んでいるので同じだと言うなら、iはベクトルではなく方向なんだ、と考えれば良い。2010.08.28;2020.12.01
第13行目から第17行目までには、第11行目の式から第13, 14行目の式が導き出される事、第13, 14行目の式が成り立つ場合には行ベクトル(dx/dt, dy/dt, dz/dt)を「vの成分表示」と呼びdx/dt, dy/dt, dz/dtの各々を「vの成分」と呼ぶ事が、書かれています。
ただし、ここでは暗黙のうちに、i, j, kがいずれも定ベクトル(時間が経っても変化しないベクトル)であると仮定しています。2010.08.23,24
第18行目から第22行目までの中で、枠よりも左の部分には、第13, 14行目の式から第18, 19行目の式が導き出される事、第18, 19行目の式が成り立つ場合には行ベクトル(d2x/dt2, d2y/dt2, d2z/dt2)を「αの成分表示」と呼びd2x/dt2, d2y/dt2, d2z/dt2の各々を「αの成分」と呼ぶ事が、書かれています。
ただし、ここでも暗黙のうちに、i, j, kはいずれも定ベクトルであると仮定しています。2010.08.24,25
第18行目から第22行目までの枠で囲ってある説明の中で「など」という言葉が用いられているのは、この記号法が、1階微分と2階微分だけに限定されるものではなく、3階微分でも4階微分でも、もっと高階の微分でも使える事を、表現するためです。2010.08.24,25
第23行目から第25行目の「経路」という言葉を敢えて定義するならば、
「Pの経路」とは、過去の何時かにPに一致したか又は現在Pに一致しているか又は将来の何時かにPに一致する静止した点全体の集合です。
つまり、Pの経路≡{Q|(Qは空間内の位置である) and ∃t; 時刻tにP=Q}
螺旋を考えれば分かる様に、Pの経路は平面内に収まるとは限りません。
Pが質点の位置である場合には、Pの経路は普通は、その質点の「軌道」と呼ばれます。
物理学では経路という語は普通は、Pのデカルト座標が時刻tのいかなる関数であるかを表すグラフ(ダイヤグラムの4次元版)の意味で用いられるので、それ以外の意味では(だからここでも)、出来れば経路という語を使わない方が良かったのですが、ここでは、Pを質点の位置に限定したくなかったので、軌道ではなく経路という言葉を用いました。2010.08.25,26,27
第26,27行目の式についての補足説明が、TEC-0-1-1-18~24とTEC-0-1-1-27~TEC-0-1-2-13に書かれています。2013.02.11
第26行目から第30行目までの内容についての補足説明が、TEC-0-1-2-16~21に書かれています。2013.02.12
第23行目に項目名として「自然基底」と書きましたが、どれが自然基底かと言うと、このページの第26行目から第29行目までの式および次ページの第1行目の式で定義されるベクトルの組eT, eN, eBが自然基底です。2010.08.27
このページの第23行目から第30行目まで、および次ページの第1行目から第7行目までの説明は、PがP0を通過した後についてです。
その事を表すために、このページの第23行目から第30行目までの図の中のPの経路に向きを付けておきました。
さらに、ds/dtが常に正である場合、つまり、Pが途中で引き返したりはしない場合、だけを考えてください。
P0の選び方は任意なので、自然基底を定義したい位置をPが通過する時刻よりも前の時刻にPが通過した位置をその都度P0に定めれば、PがP0を通過した後についての式だけを使って、全ての時刻のPの位置での自然基底を求める事が出来ます。
その様な事が出来るのは、P0を変更しても自然基底は変わらないからです。
PがP0'を通過した後経路に沿ってs0だけ進んだ時にP0を通過する様にP0'を定めると、P0をP0'に変更する事は、sをs'=s+s0に変更する事のみを通して、自然基底の定義に効いて来ますが、ds/ds'=1∴d/ds'=(ds/ds')(d/ds)=d/dsだから、第26行目から第29行目までの式は変更を受けません。
だから、P0を変更しても自然基底は変わりません。2010.08.27,28
このページの第26行目から次ページの第1行目までの内容についての補足説明が、COM-1-1-19に、書かれています。2013.02.20
第30行目は曲率半径の定義ではありません。
第30行目は、ρ≡1/|deT/ds|で定義されるρは曲率半径に一致する、という風に読んで下さい。
曲率半径とは、Pの経路のPの近傍を最も良く近似する円の半径です。
近似ならば曲率半径はピッタリこの値ですという風には決まらないのか、と言われるといけないので補足説明すると、最も良く近似する円は1つだけだから、曲率半径はピッタリこの値ですという風に決まります。2010.08.28
第30行目の内容についての補足説明が、TEC-0-1-2-24~TEC-0-1-3-9に書かれています。2013.02.12
【SEOテキスト】宇田雄一,03.7.18,第1章,点の運動の記述,[1]時刻・位置・速度・加速度,①定義,P(動点),t(時刻),Pの速度ベクトルは,r(Pの位置ベクトル),dr,v≡,-,dt,dv,d2r,O(原点),Pの加速度ベクトルは,α≡,-,=,-,dt,dt2,②デカルト座標,r=xi+yj+zk,互いに直交する3つの単位ベクトル(右手系),(x,y,z)・・・・・Pのデカルト座標,dx,dy,dz,k,v=,-,i+,-,j+,-,k,dt,dt,dt,j,(,dx,dy,dz,-,-,-,dt,dt,dt,)・・・・・vの成分表示,i,vの成分,d2x,d2y,d2z,dx,α=,-,i+,-,j+,-,k,-,を,dt2,dt2,dt2,dt,(,d2x,d2y,d2z,-,-,-,dt2,dt2,dt2,)・・・・・αの成分表示,-,を,dt2,αの成分,などと略記する,③自然基底,Pの経路,P0(Pの経路上の任意の固定点),eB,s(P0からPまでの経路の長さ),dr,eN,eT,接線ベクトル:eT≡,-,ds,deT,s,P,主法線ベクトル:eN≡,ρ,-,ds,P0,ρ≡1/|deT/des|・・・・・曲率半径