
次のページ
前のページ
目次
COM-1-17
[補足説明欄]
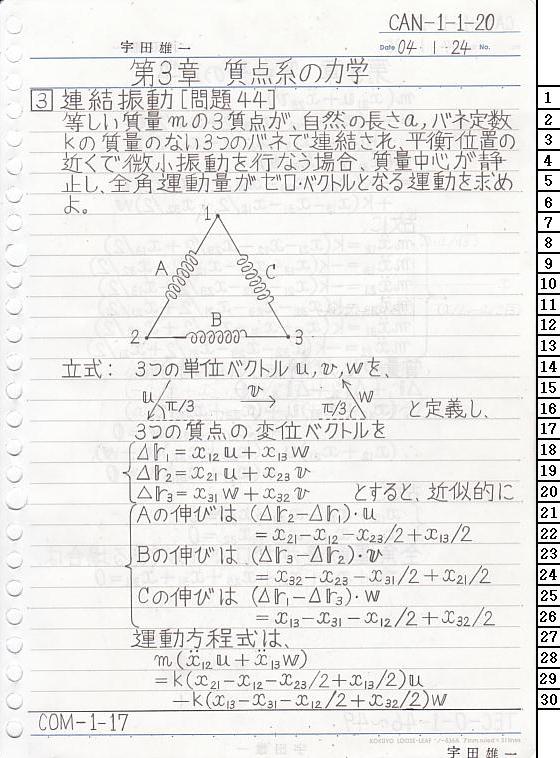
1行目の「 [3] 連結振動 [問題44] 」は、CAN-1-1-20-2からCAN-1-1-21-24までの記事のタイトルです。
ここで扱われている問題は、CAN-1-1-15で
n = 3,
m1 = m2 = m3 = m,
Fi(ξ, μ, ω) = 0,
Fij(ξ, η, μ, ν, ω) = k ( |η - ξ| - a ) (η - ξ)/|η - ξ| ・・・ ※
とした場合です。
CAN-1-1-15-16,25の条件が成り立つ事を確認できるので、作用反作用の法則も角運動量保存の法則も成り立つケースです。
※はフックの法則を表しています。
フックの法則は、弾性体の内部応力や弾性体が外部に及ぼす力、外部から受ける力が、弾性体の変形量に比例する、という法則です。
細かい事を言うと、力の向きや変形の詳細、応力も変形も弾性体の部分ごとに異なる事、も考慮する必要が有りますが、ザックリ言うとそうです。
フックの法則は現象論的な法則です。
このページで問題にしているケースでは、バネがその弾性体です。
端点に結合されている物体にバネが及ぼす力は、向きがバネに平行で、バネが自然長より長い時には引く向き、バネが自然長より短い時には押す向き、力の大きさはバネの現在の長さと自然長の差の絶対値のk倍に等しい、というのが※の意味です。
この様な問題設定は高校物理以来おなじみの物ですが、批判的に見ると次の点を指摘できます。
P1, P2, P3 以外にバネも存在するので、P1, P2, P3 だけで全体系ではない、したがってCAN-1-1-15の一般論の具体例とは言えない。
Pi はバネから力を受けるのみであり、Pi が Pj から受ける力は 0 だから、※は成り立たない。
この故に、架空の系で考えるのではなく実際にバネと質量を持った固体粒を連結して水平面上に置いて実験すれば、摩擦力や空気抵抗力を完全に除去できたとしても、CAN-1-1-20からCAN-1-1-21までの内容とは実験結果が食い違う、と考えられます。
その主な理由は、現実のバネは質量を持つ事、特に全体として質量を持つだけでなくあらゆる部分が質量を持つ事です。
そのため、実際のバネの変形はバネ内部を波として伝わり、この事が※の正確な成立を妨げます。
現実には、バネ(の中心軸)が曲がるという事も起こり得て、これも※の正確な成立を妨げます。
CAN-1-1-20からCAN-1-1-21までの内容は、そういった現実の問題の近似処理か、または、バネは存在せず力の法則※が成り立っているという架空の系を(数学的な近似処理はするけど物理的には)近似なしで正確に扱った物か、どちらかだと見なされるべきです。2019.07.22,23,24,27;2019.08.17;2020.12.01
4,5行目に書かれている「質量中心が静止し、全角運動量がゼロ・ベクトルとなる」という条件を満たす解は存在するのか、という問いに対しては、最も口数少なく答えるなら「試しにこれらの条件を入れて求解し、解を得る事が出来れば存在するという事だから考える必要は無い、解を得る事が出来なかったら、その時に考えよう」と答える事が出来るし、また、以下の事情から察して、存在するはずだと判断する事が出来ます。
一般解は、バネの微小変形に相当する運動と質量中心の運動と系全体の回転運動を合成した運動だ。
このうちの質量中心の運動と系全体の回転運動については、運動量保存の法則と角運動量保存の法則のせいで、質量中心の速度も全角運動量も一定だと予め分かっている。
したがって、これらを両方とも時刻にかかわらず常にゼロ・ベクトルだと指定しても、そういう解は存在する。2019.07.27;2019.08.17
6~13行目の図に「1」と書かれているのがP1, 「2」と書かれているのがP2, 「3」と書かれているのがP3です。2019.07.22
14行目に書かれている「単位ベクトル」とは、長さが1であるベクトルの事です。
単位ベクトルという概念の説明はCAN-1-1-1の補足説明欄に書かれています。2019.07.22;2020.12.01
15,16行目の図において角度はラジアン表記されています。
π/3 = (π/3)[ラジアン] = 60[度]、
です。2019.07.22
15,16行目の3つのベクトルのうちのいずれの2つも線形独立なので、18~20行目のどの1つの式でも、u, v, w のうちのどの2つを用いても構いません。
18~20行目の各式では、どの2つを用いるかの選択を、勘で行なっています。
18行目で私が u と w を選んだのは、P1に連結されているバネの向きが u と w だからです。
19行目で私が u と v を選んだのは、P2に連結されているバネの向きが u と v だからです。
20行目で私が w と v を選んだのは、P3に連結されているバネの向きが w と v だからです。2019.07.22
17行目の「変位ベクトル」とは、(現在の位置ベクトル) - (元の位置ベクトル) の事です。2019.07.22
21~26行目では、x12, x13, x21, x23, x31, x32 の2次(2乗)以上の項を、1次(1乗)の項に比べてずっと小さいからという理由で、無視しています。
その事が20行目に「近似的に」という言葉で表されています。2019.07.22
21, 23, 25行目では、近似なしの計算をキチンとした上で2次以上の項を落とした、のではなく直感的に変位ベクトルのバネ方向への射影を考えています。
だから、21行目では本当は (⊿r2 - ⊿r1)・u ではなく ⊿r2・u + ⊿r1・(-u) と書くべきだったし、
23行目では本当は (⊿r3 - ⊿r2)・v ではなく ⊿r3・v + ⊿r2・(-v) と書くべきだったし、
25行目では本当は (⊿r1 - ⊿r3)・w ではなく ⊿r1・w + ⊿r3・(-w) と書くべきでした。
これは、変位は微小なのでバネの向きは変化しないという近似を用いた、という事です。
この事は、この問題において変位が微小とは何なのかを定義する基準を与えます。
この問題において変位が微小とは、|⊿r1|, |⊿r2|, |⊿r3| のいずれもがバネの自然長 a よりずっと小さい事です。
それならバネの向きはほとんど変化しません。
ただし、微小という言葉は無限小という意味で使われる事も多いので気を付けて下さい。
何らかの数や量が無限小だ、という事は有り得ないので、微小という言葉を無限小という意味で使う事は、近似なしで(広い意味での)微分係数の話をする、と解釈されるべき事です。2019.07.24;2019.08.17
22行目の等号の成立根拠は、18,19行目の式と
u・u = 1, v・u = cos(2π/3) = -1/2, w・u = cos(2π/3) = -1/2
である事です。2019.07.24
24行目の等号の成立根拠は、19,20行目の式と
v・v = 1, u・v = cos(2π/3) = -1/2, w・v = cos(2π/3) = -1/2
である事です。2019.07.24
26行目の等号の成立根拠は、18,20行目の式と
w・w = 1, u・w = cos(2π/3) = -1/2, v・w = cos(2π/3) = -1/2
である事です。2019.07.24
28~30行目の運動方程式はP1の運動方程式です。
28行目の辺は m1(d2/dt2)r1 = m(d2/dt2)⊿r1 です。
29行目の ( ) 内がバネAの伸び(22行目)である事に気を付ければ、29行目の項はP1がバネAから受ける力だと分かります。
30行目の ( ) 内がバネCの伸び(26行目)である事に気を付ければ、30行目の項はP1がバネCから受ける力だと分かります。2019.07.24,27,28;2019.08.17,21
P2, P3 の運動方程式は次ページに書かれています。2019.07.24
【SEOテキスト】宇田雄一,04.1.24,第3章,質点系の力学,[3]連結振動[問題44],等しい質量mの3質点が、自然の長さa,バネ定数kの質量のない3つのバネで連結され、平衡位置の近くで微小振動を行なう場合、質量中心が静止し、全角運動量がゼロ・ベクトルとなる運動を求めよ。,1,A,C,B,2,3,立式:3つの単位ベクトルu,v,wを、,u,π/3,v,w,π/3,と定義し、3つの質点の変位ベクトルを,{,⊿r1=x12u+x13w,⊿r2=x21u+x23v,⊿r3=x31w+x32v,とすると、近似的に,{,Aの伸びは(⊿r2-⊿r1)・u=x21-x12-x23/2+x13/2,Bの伸びは(⊿r3-⊿r2)・v=x32-x23-x31/2+x21/2,Cの伸びは(⊿r1-⊿r3)・w=x13-x31-x12/2+x32/2,運動方程式は、,m(,12u+,13w)=k(x21-x12-x23/2+x13/2)u-k(x13-x31-x12/2+x32/2)w